"AI+安防”进入下半场,视觉据相关数据,到2025年,平安城市、智能交通、感知泛园区等领域仍将是智能筑领准视智能化落地主战场。同时,化构前端智能化的渗透比例在快速提升,在平安城市和交通,前端智能化渗透率新建市场占比10,而其他行业在3水平。而过去的先精2019年相比2018年,前端智能化占比增100。当然,频智前端智能化比例提升,只是说明AI摄像机的部署及快速普及情况,未来的智能安防监控系统,“前后端协同”是必然趋势。
前后端协同的道理很简单:好比一个企业竞标项目,总部、区域总部、感知地方办事处需要协同作战,智能筑领准视才能发挥最佳效果。地方办事处在一线,化构最贴近客户,响应速度快,但是资源和格局有限;而总部具有更多全局视野,可以调动、整合更多资源,先精可以跨区域调动资源及支持,全力支持一线。如果让地方办事处单打独斗或者总部亲自操刀,频智都不是最佳方式。
回到平安城市或者智能交通应用,视觉前端智能的优势是多维数据实时感知,可以克服摄像机联网故障等问题实现基本的视频检测功能;后端检测的优势是业务之间的协同性,将违法检测和事件检测联系起来,通过统一的指挥调度,实现违章处理、秩序管理、感知交通基础设施维护、智能筑领准视及路面养护的协同联动。前端重在采集,能力单一;后端重在应用,融合协同。
例如,XX路段塌陷、路面积水、或交通标志标线磨损,导致驾驶员由于无法辨识而产生大量的违章行为,AI视频解析就需要在违法检测的同时,也能通过各个地理位置的历史违章数据统计识别出异常违章场景,以及通过AI视频解析的事件检测功能识别出导致异常违章的根因,并协调相关人员及时处理、在第一事件消除路面安全隐患,起到事前预防的效果。
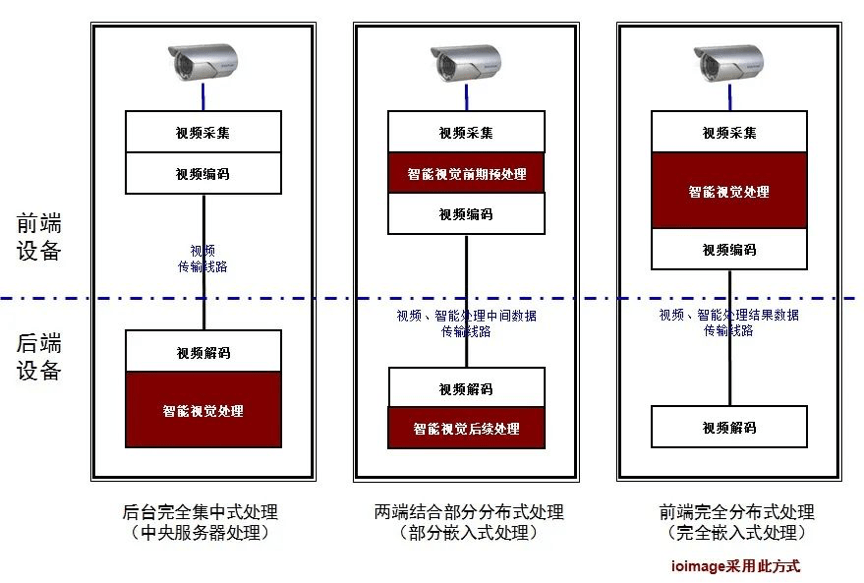
前端智能不是近年来才有的,早在2005年前后的那一拨以OV/NICE/VERINT/IOI主导的视频分析大潮中,前端智能的重要性已凸显。当时前端智能的典型是以色列的IOImage公司,其在2002年就押宝在前端设备,这在当时所有公司大力鼓吹在PC上跑算法,每年PC的处理能力增长一倍、芯片价格下降一倍的预测背道而驰。IOImage赌中了,迎来一段高光时刻。
今时今日,在AI深化的智能时代,算法赋能、芯片助力,前端摄像机的智能程度跟早期简单的识别分析不可同日而语,但仍有诸多挑战。受限于算法和芯片技术,在雨天、夜间、雾霾等不可抗拒的环境因素影响时,会导致成像质量不佳;另外场景中的角度、遮挡、光线和像素等因素也会导致目标识别的准确率偏低,很难将智能真正应用于实战。
面对这些挑战,整个业界对摄像机智能化的诉求越来越高,摄像机已经从以“编码”为中心的10年一代转向了以“人工智能”为中心的3~6个月一轮迭代,要求摄像机内置智能算力、算法解耦、能够在线加载算法。让摄像机从“看得见、看得清”,进而能够“看得懂”。前端视觉感知智能化,提升了算力效率同时降低了反应时间,进而提升了视频、图片及各种数据采集的质量和协同性,有效了解决了上述各种挑战,为前端“全息感知”奠定基础。
随着芯片的发展,尤其是专门为视觉处理设计的芯片体积的减小、能耗的降低以及处理能力的增强,将AI 芯片放置在前端摄像机中,通过前移算力算法使终端设备拥有强大的视频图像采集技术和数据分析存储能力,对视频图像进行预处理,去除图像冗余信息,使得部分或全部视频分析迁移到边缘处,由此分摊云中心的计算和存储压力,提高视频分析的速度。
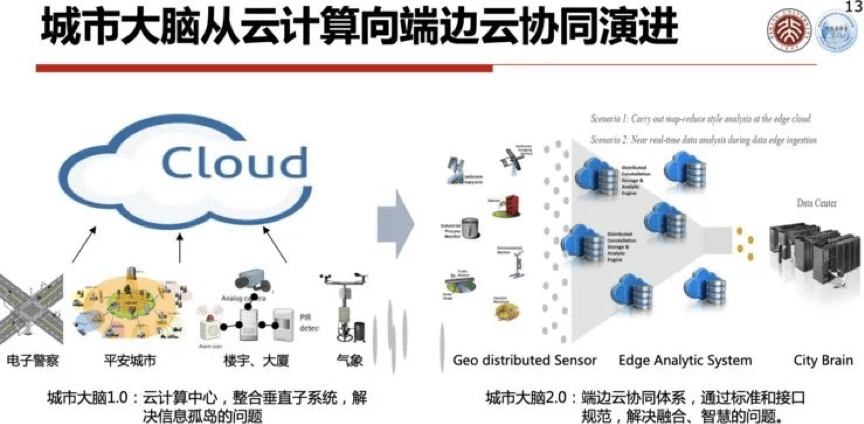
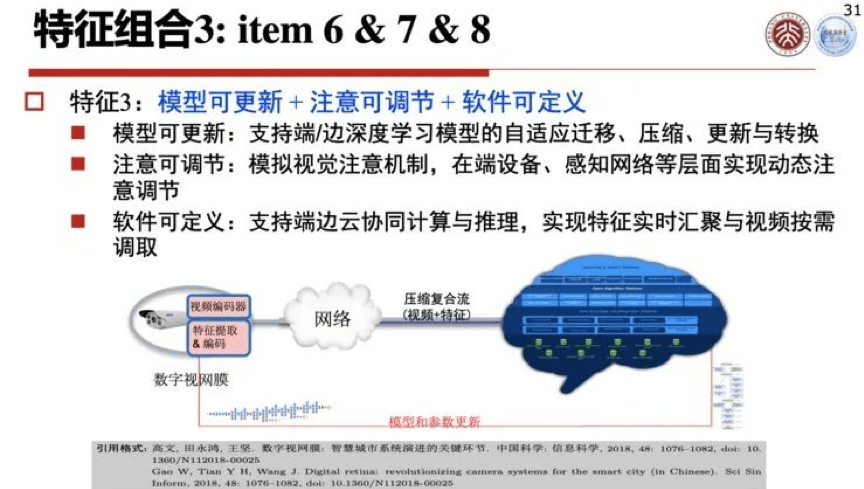
在高文院士:城市大脑的「痛点」与「突破」的演讲中提到的“数字视网膜”,相当于城市大脑边缘或者是终端方面做得更高效,这样就可以使得云端的算力不需要那么多,或者说云端的响应可以更精确、速度更快,这样就使得城市大脑可以做得更好一些。
另外,高院士指出,未来智能视频监控系统要想升级,可以通过软件定义的方法,对系统自动升级。实际上,之前行业也一直有企业推动摄像机的AI OS,旨在使得软件与硬件解耦,通过轻量化容器技术构建面向多算法的集成框架,让各算法独立运行,实现算法的快速加载与在线迭代。
华为机器视觉在2018年3月提出了前端智能摄像机“软件定义”的理念,在2020年6月主导首个软件定义摄像机国际标准,推动架构及接口形成ITU-T标准。通过领先的前端智能架构,通过AI算力加持,引领在图像和智能感知优势与创新,通过软件定义实现多业务多场景的智能按需使用,可持续演进。
在AI安防下半场,算法就是服务场景来做落地应用,并以此形成智能安防解决方案。场景的极大丰富及安防的个性化特征导致对算法的灵活性和持续迭代要求非常高。如果一个硬件只有一种算法,或者说硬件植入的算法不能延展,那对于智能安防落地场景将是一个桎梏。AI 算法Store简单理解就是让工程项目从算法加载到场景应用,无缝连接。只需要在算法Store网站上选择自己的设备型号和场景需求,就能匹配到合适、高质量的算法。
华为摄像机以SuperColor 、SDC OS、IoT生态仓、HoloSensStore等多项突破性创新,深化视觉感知智能化,提升全天候全场景的视觉数据采集的质量,构筑领先精准视频智能。
华为倡导的机器视觉前端智能化,主要有以下几个方面考虑:
第一,增强全天候图像质量:根据环境的照度、目标速度等变化,前端AI算法实时调节摄像机ISP参数如快门、光圈、曝光等系数,输出最佳的抓拍图去重的、保证最优姿态的图片;前端智能还可以精准地做到人脸和人体数据的关联。从而增强全天候的图像质量。
第二,适配多样性场景:前端智能可适配复杂多场景,如摄像机在不同时段、不同预置点设置不同场景化智能,白天做车辆排队长度检测、事故检测、夜间做违停抓拍检测,或者预置点间不同智能切换,充分发挥智能化的效能。软件定义来消化客户个性化/场景化的算法诉求,降低多样化算法交付的敞口风险,提升客户智能创新的响应能力。
第三,实现毫秒级联动系统响应:前端智能有利于业务快速闭环和系统间联动,如车路协同V2I高速运动场景,视频感知的路侧信息要毫秒级实时发布给附件车辆,保障通行安全。摄像机与补光灯、雷达、红绿灯信号检测器等外部配套设备需要毫秒级完成联动,在恰当时刻曝光、针对不同区域启动精准补光,与红绿灯信号检测器周期同步,输出有效的取证图片。此外如雷球联动、枪球联动、人车道闸联动场景,前端智能化更有利于保障业务的实时性,大幅提升系统的响应效率。
第四,提升算力效能,降低整体TCO:前端摄像机仅处理单路视频,对算力制程要求比后端更低,信号处理时可直接从RawData获取数据,算力成本低,处理效率高。前端智能化输出优质图片,可减少后端二次解码环节,专注于智能分析。同样算力下,图片分析比视频分析的效率高10倍。在1000路智能分析的典配场景,前端智能比后端智能的TCO节约55。
第五,提升工程效率:前端智能化系统架构有支持多算法并行、多功能合一的优势,如一个摄像机可同时支持电警、卡口、流量检测等业务能力,而原来需要三个不同设备才能实现,所以前端智能大大降低了工程实施的难度,提升了工程效率。
在AI安防的下半场,华为是变局者,他们智能摄像机有三大全新特质:AI新架构、算力换图像、全息数据感知。今年五月在钱塘江畔华为机器视觉推出5款重磅摄像机产品,可见华为在前端智能化方面的决心与魄力。之于华为,智能让摄像机成为“新工具”,在我们熟知的“旧行业”中,重新碰撞出智能的火花。
小结:前端智能化已经形成产业共识,未来的摄像机,AI将会是基本配置。但是前端智能化与后端智能并不是二选一关系,而是协同融合关系,以发挥优势,实现快速、实时、高效、多维、全栈智能解决方案。对于前端智能化,除了算法本身,行业也在积极探索,参与和拥抱硬件方案。已经有多个厂家已经跟进“软件定义摄像机”,还有的提出了异曲同工的“场景化智能摄像机”等,“场景化智能摄像机”未来一定也会走向“算法解耦、算法仓库”模式。视觉感知智能化,可以极大提升数据采集的质量,同时降低后端数据处理的算力消耗,降低整体TCO,同时分布式处理也提升了系统可靠性。视觉感知智能化,从源头影响数据的产生,支撑释放海量视频数据的价值,构建物理世界的数字孪生。如此,安防在AI世界才能闯荡出别样的精彩。
(责任编辑:时尚)